MPU6050 六軸慣性感測器
MPU6050 是 InvenSense 推出的 MEMS 六軸慣性感測器,整合 3 軸陀螺儀與 3 軸加速度計於單一晶片,內建 DMP(Digital Motion Processor)硬體姿態融合引擎,廣泛用於無人機飛控、手機螢幕旋轉、機器人平衡、VR/AR 頭盔等需要即時姿態追蹤的應用。
規格一覽
| 參數 | 陀螺儀 | 加速度計 |
|---|---|---|
| 測量範圍 | ±250 / 500 / 1000 / 2000 °/s | ±2 / 4 / 8 / 16 g |
| 解析度 (16-bit) | 131 / 65.5 / 32.8 / 16.4 LSB/(°/s) | 16384 / 8192 / 4096 / 2048 LSB/g |
| 取樣率 | 最高 8 kHz | 最高 1 kHz |
| 雜訊密度 | 0.005 (°/s)/√Hz | 400 μg/√Hz |
| 非線性度 | ±0.2% | ±0.5% |
| 介面 | I2C (0x68/0x69) + SPI (MPU6000) | |
| 內建功能 | DMP 姿態融合、FIFO、中斷、溫度感測 | |
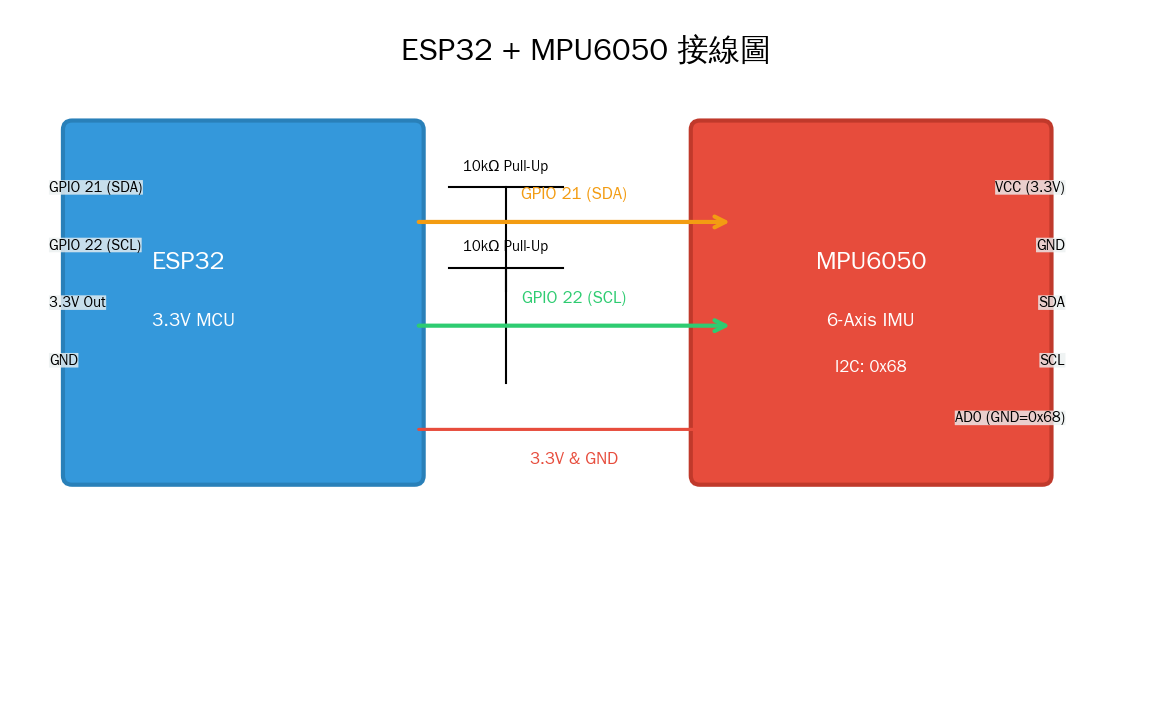
硬體接線
| MPU6050 | ESP32 | 備註 |
|---|---|---|
| VCC | 3.3V | 不可接 5V!MPU6050 最高 3.6V |
| GND | GND | 共地必要 |
| SCL | GPIO 22 | I2C 時鐘(需 4.7kΩ 上拉) |
| SDA | GPIO 21 | I2C 資料(需 4.7kΩ 上拉) |
| AD0 | GND | I2C 位址 = 0x68;接 3.3V 則為 0x69 |
| INT | GPIO 4 (可選) | 中斷輸出(資料就緒) |
注意:大部分 MPU6050 模組(如 GY-521)已內建 I2C 上拉電阻,不需額外添加。
I2C 暫存器讀取
MPU6050 使用標準 I2C 協定,7-bit 位址 0x68(AD0=LOW)。設定暫存器和讀取感測資料都透過 I2C 進行:

關鍵暫存器速查
| 位址 | 名稱 | 預設值 | 說明 |
|---|---|---|---|
| 0x19 | SMPLRT_DIV | 0x07 | 取樣速率除頻器 |
| 0x1A | CONFIG | 0x00 | 數位低通濾波器 (DLPF) 設定 |
| 0x1B | GYRO_CONFIG | 0x00 | 陀螺儀滿量程範圍選擇 |
| 0x1C | ACCEL_CONFIG | 0x00 | 加速度計滿量程範圍選擇 |
| 0x3B | ACCEL_XOUT_H | - | 加速度 X 軸高位元組(Burst 讀取起點) |
| 0x41 | TEMP_OUT_H | - | 溫度資料高位元組 |
| 0x43 | GYRO_XOUT_H | - | 陀螺儀 X 軸高位元組 |
| 0x6B | PWR_MGMT_1 | 0x40 | 電源管理(Bit 7 = Reset, Bit 6 = Sleep) |
| 0x75 | WHO_AM_I | 0x68 | 元件辨識碼(唯讀) |
Arduino 程式設計
基礎讀取:原始陀螺儀與加速度資料
// ESP32 MPU6050 基礎讀取
#include <Wire.h>
#define MPU6050_ADDR 0x68
void setup() {
Serial.begin(115200);
Wire.begin(21, 22); // SDA, SCL
// 初始化 MPU6050
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x6B); // PWR_MGMT_1
Wire.write(0x00); // 喚醒(清除 Sleep 位元)
Wire.endTransmission(true);
// 設定陀螺儀量程 ±500°/s
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x1B); // GYRO_CONFIG
Wire.write(0x08); // ±500°/s (65.5 LSB/(°/s))
Wire.endTransmission(true);
// 設定加速度計量程 ±4g
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x1C); // ACCEL_CONFIG
Wire.write(0x08); // ±4g (8192 LSB/g)
Wire.endTransmission(true);
Serial.println("MPU6050 初始化完成");
delay(100);
}
void loop() {
int16_t ax, ay, az, gx, gy, gz, temp;
// Burst 讀取:從 0x3B 開始連續讀取 14 個位元組
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x3B); // 起始暫存器
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 14, true);
ax = (Wire.read() << 8) | Wire.read(); // ACCEL_XOUT_H/L
ay = (Wire.read() << 8) | Wire.read();
az = (Wire.read() << 8) | Wire.read();
temp = (Wire.read() << 8) | Wire.read(); // TEMP_OUT_H/L
gx = (Wire.read() << 8) | Wire.read(); // GYRO_XOUT_H/L
gy = (Wire.read() << 8) | Wire.read();
gz = (Wire.read() << 8) | Wire.read();
// 轉換為物理單位
float a_scale = 8192.0; // ±4g
float g_scale = 65.5; // ±500°/s
float tempC = temp / 340.0 + 36.53;
Serial.printf("Accel: %.2f %.2f %.2f g | Gyro: %.1f %.1f %.1f °/s | Temp: %.1f&C
",
ax/a_scale, ay/a_scale, az/a_scale,
gx/g_scale, gy/g_scale, gz/g_scale, tempC);
delay(50); // 20 Hz
}
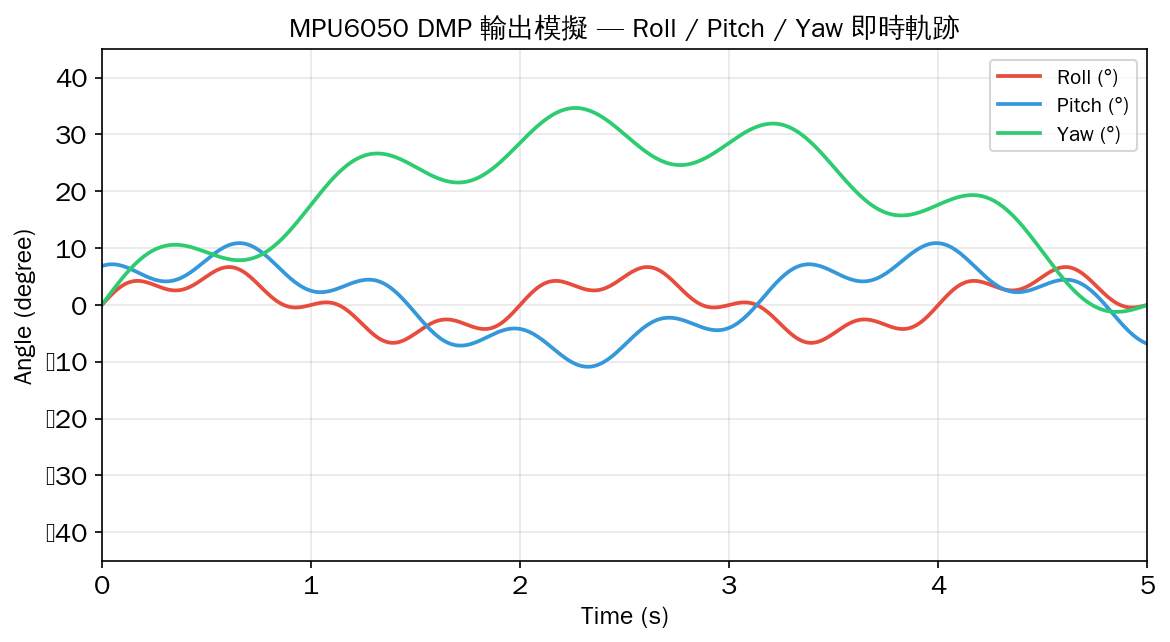
DMP 姿態解算
MPU6050 內建的 DMP(Digital Motion Processor)是專用的硬體運動處理器,可將陀螺儀與加速度計資料融合,輸出四元數或尤拉角,大幅減輕主控晶片的運算負擔。

使用 MPU6050_tockn 函式庫
// ESP32 MPU6050 DMP 姿態解算(含 filter)
// 下載並安裝 MPU6050_tockn 函式庫
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup() {
Serial.begin(115200);
Wire.begin(21, 22);
mpu6050.begin();
mpu6050.calcGyroOffsets(true); // 自動校正陀螺儀零偏
Serial.println("DMP 初始化完成,請保持靜止 5 秒...");
}
void loop() {
mpu6050.update(); // 更新感測器資料 + 互補濾波
Serial.printf("Roll: %.2f° | Pitch: %.2f° | Yaw: %.2f° ",
mpu6050.getAngleX(), // Roll (繞 X 軸)
mpu6050.getAngleY(), // Pitch (繞 Y 軸)
mpu6050.getAngleZ()); // Yaw (繞 Z 軸)
Serial.printf("| Accel: %.2f %.2f %.2f g ",
mpu6050.getAccX(), mpu6050.getAccY(), mpu6050.getAccZ());
Serial.printf("| Gyro: %.2f %.2f %.2f °/s
",
mpu6050.getGyroX(), mpu6050.getGyroY(), mpu6050.getGyroZ());
delay(10); // 100 Hz
}
使用 MPU6050 DMP 原生韌體庫(精確版)

// ESP32 MPU6050 DMP 原生 FIFO 讀取
// 安裝 MPU6050 by Electronic Cats 函式庫
#include <MPU6050_6Axis_MotionApps20.h>
MPU6050 mpu;
uint16_t fifoCount;
uint8_t fifoBuffer[64];
Quaternion q; // 四元數
VectorInt16 aa; // 加速度計 raw
VectorFloat gravity; // 重力向量
float ypr[3]; // Yaw/Pitch/Roll (弧度)
void setup() {
Serial.begin(115200);
Wire.begin(21, 22);
mpu.initialize();
if (!mpu.testConnection()) {
Serial.println("MPU6050 連接失敗!");
while (1);
}
// 初始化 DMP
uint8_t devStatus = mpu.dmpInitialize();
if (devStatus != 0) {
Serial.printf("DMP 初始化失敗:%d
", devStatus);
while (1);
}
// 設定感測器偏移值(需事先校準)
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788);
// 啟用 DMP
mpu.setDMPEnabled(true);
mpu.resetFIFO();
Serial.println("DMP 已啟用,請等待資料...");
}
void loop() {
fifoCount = mpu.getFIFOCount();
if (fifoCount < 42) return; // DMP 封包大小
mpu.getFIFOBytes(fifoBuffer, 42);
// 從 FIFO 解出四元數
mpu.dmpGetQuaternion(&q, fifoBuffer);
// 轉換為尤拉角
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
// 轉換為度數並輸出
float yaw = ypr[0] * 180.0 / M_PI;
float pitch = ypr[1] * 180.0 / M_PI;
float roll = ypr[2] * 180.0 / M_PI;
Serial.printf("Yaw: %7.2f° | Pitch: %7.2f° | Roll: %7.2f°
",
yaw, pitch, roll);
}
互補濾波器 vs Kalman 濾波器 vs DMP
| 演算法 | 運算量 | 精度 | 延遲 | 實作難度 | 適用場景 |
|---|---|---|---|---|---|
| 互補濾波器 | 極低 | 中等 | 低 | 簡單 | 入門、玩具 |
| Mahony/Madgwick | 低 | 高 | 中 | 中等 | 一般姿態解算 |
| Kalman 濾波器 | 高 | 非常高 | 高 | 困難 | 精密導航 |
| DMP(硬體) | 無 | 高 | 低 | 簡單 | MPU6050 最佳解 |
互補濾波器自實作
// 簡潔互補濾波器(搭配 MPU6050 原始資料)
typedef struct {
float roll; // °
float pitch; // °
} Attitude;
Attitude complementaryFilter(float ax, float ay, float az,
float gx, float gy, float gz,
Attitude prev, float dt, float alpha) {
// alpha = 0.98, dt = 時間間隔 (秒)
// 從加速度計計算傾角(參考重力向量)
float accRoll = atan2(ay, az) * 180.0 / M_PI;
float accPitch = atan2(-ax, sqrt(ay*ay + az*az)) * 180.0 / M_PI;
// 從陀螺儀積分角度
float gyroRoll = prev.roll + gx * dt;
float gyroPitch = prev.pitch + gy * dt;
// 互補融合
Attitude out;
out.roll = alpha * gyroRoll + (1 - alpha) * accRoll;
out.pitch = alpha * gyroPitch + (1 - alpha) * accPitch;
return out;
}
FIFO 與中斷應用
// MPU6050 FIFO 中斷讀取(不阻塞主迴圈)
// INT 腳位接 ESP32 GPIO 4
volatile bool dataReady = false;
void IRAM_ATTR onDataReady() {
dataReady = true;
}
void setup() {
pinMode(4, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(4), onDataReady, RISING);
// ... MPU6050 + DMP 初始化(同上)...
// 啟用中斷輸出
mpu.setIntEnabled(true);
mpu.setIntDMPEnabled(true);
}
void loop() {
if (!dataReady) {
// 主程式可以執行其他工作(如 Wi-Fi、顯示)
return;
}
dataReady = false;
// 讀取 FIFO 並解算(同上)
fifoCount = mpu.getFIFOCount();
if (fifoCount >= 42) {
mpu.getFIFOBytes(fifoBuffer, 42);
// 解算並輸出姿態
}
}
實務注意事項
- 電壓:MPU6050 僅支援 3.3V,接 5V 會燒毀!ESP32 的 3.3V 可直接供電
- 冷啟動:第一次上電時 MPU6050 處於睡眠模式(PWR_MGMT_1 = 0x40),需寫入 0x00 喚醒
- 陀螺儀零偏:開機後前幾秒的靜止資料平均可作為零偏補償,DMP 初始化時會自動校正
- Yaw 飄移:陀螺儀有累積誤差,Yaw 會隨時間緩慢飄移。MPU6050 沒有磁力計,無法絕對校準 Yaw。如需要精確 Yaw,請選用 MPU9250(含磁力計)
- 加速度計衝擊:加速度計對震動敏感,安裝時建議使用避震墊
- 取樣率 vs DLPF:內部取樣率 1 kHz(加速度)/ 8 kHz(陀螺儀),透過 DLPF 可設定低通截止頻率(5~260 Hz)
- FIFO 溢位:如果主控讀取太慢,FIFO 會溢位(overflow),需 reset FIFO 並重新開始
總結
MPU6050 是 CP 值最高的六軸 IMU 感測器,搭配 ESP32 的 I2C 介面和內建 DMP 硬體融合引擎,可在不佔用 CPU 資源的情況下即時輸出精確的 Roll/Pitch/Yaw 姿態資料。
選型參考:
- 基礎傾角偵測:MPU6050 + 互補濾波器(程式簡單、適合入門)
- 姿態即時追蹤:MPU6050 + DMP(硬體融合、不佔 CPU)
- 精確 Yaw 與方向:MPU9250(含 AK8963 磁力計)或 ICM-20948
- 機器人平衡車:MPU6050 + DMP + PID 控制(100 Hz 更新率已足夠)
- 無人機飛控:MPU6000(SPI 介面、更低延遲)或 ICM-20602

文章評論